步进电机的驱动方式有整步 半步 细分驱动
步进电机的驱动方式有整步,半步,细分驱动。三种控制方式既有区别又有联系,目前大部分步进电机驱动器都
有细分驱动功能。
两相步进电机的内部示意图:
.png)
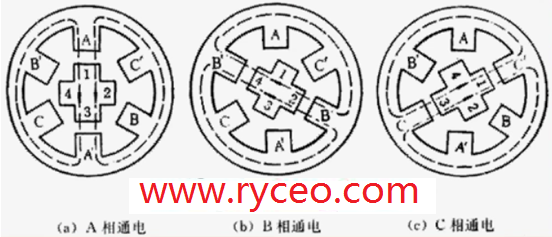
通过上电机内部结构示意图,可以得出。为确保步进电机的转子连续、平稳地转动,定子必须产生并提供一个连续、
平均的磁场环境,并且通过结构分析也可以得出,电机转子始终跟随电机定子合成的磁场方向变化而运转。因此若
电机定子合成的磁场变化太快,电机转子跟随不上变化而运转,那么步进电机就出现弊端,就是目前大家熟知的步
进电机失步现象。
因此我们在调试和控制驱动电机的时候,需要结合电机的特性和外围结构做好测试协调,确保电机运行在最优状态
,这样整个系统结构控制精度和稳定性才能得到保证。
上部分我们大致介绍了电机转子是跟随电机定子磁场切换变化而转动的,而且电机定子磁场的强度和方向是由
定子合成电流决定,且属于成正比关系。当三相定子绕组轮流接通驱动脉冲时,产生磁场吸引转子转动。因此我们
只要控制电机的定子电流,就可以达到驱动控制电机的运作状态。
.png)
目前步进电机常规的驱动方式有整步、半步、和细分3种方式,在此我们们做个简单的介绍:
1、整步驱动方式:(2相2拍方式的步距)对于整步驱动方式,电机是走一个整步,如对于一个步进角是3.6°的步进
电机,整步驱动是每走一步是走3.6°。
.png)
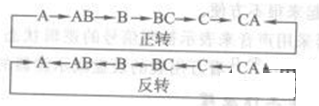
上图是整步驱动方式中,电机定子的电流次序示意图:
.png)
由此可知,整步驱动的方式是每一时刻只有一个相通电,所以这种驱动方式的驱动电路相对比较的简单,控制驱动
的程序代码也是相对容易实现的,电机整步驱动相序如下(忽略图中没有参与的C,我懒得再重新画图):
B B’→A’A→B’B→A A’→B B’
整步驱动步进电机,低速时电机会抖动,噪声会比较大。但是,这种驱动方式无论在硬件或软件上控制都相对
简单,从而驱动器制造成本容易得到控制。
2、半步驱动方式(2相4拍方式的步距)
对于半步驱动方式,电机是走一个半步,如对于一个步进角是3.6°的步进电机,半步驱动是每走一步,是走1.8°(3.6°/2)。
由上图可见,步进电机半步驱动方式的比整步驱动方式相对要复杂一些,因为在同一时刻会有两个相都需要被通电。
这个时候若要求输出电机转动的力矩平稳,则需要在给两相同时通电时的电流进行控制,一般控制的通电电流应该
为单相通电电流的sin(45°),即√2/2。要是嫌弃麻烦,要求也不高,其实也是可以直接输出和单相通电流相等的电流。
这样直接输出的现象是,可以感觉到电机转动的过程中输出的力矩不恒定,但它带来的好处是驱动电路以及驱动软件
在编写的时候的工作量简化。
以下是半步驱动方式的驱动相序描述(借用3相图纸,懒得再画):
BB’→BB’ A’A→A’A→B’B A’A→ B’B→B’B AA’→AA’→ AA’ BB’
如果需要反转,只需按以上相序的逆向进行通电即可。
控制方式按以上相序对电机通电时候,产生的电流矢量则可以把一个圆分割成8份,
因此半步驱动使电机的步进分辨率提高了一倍,而且电机运转也更为平稳很多。
通过上述半步的介绍,可以明显得出半步驱动方式较比上一个整步控制方式有了重要的改观,就是在电机不变的前
提下,提高了输出控制精度。因此是在没有更改电机的情况下,电机的步进角分辨率提高了一倍,且电机运行相对
平稳安静很多。
3、细分驱动方式
从文字概念上认知,就是把一步角度细分为多步,电机转子走一步的角度将会随着细分数的增加而减小,那么电机
转动起来也就越来越平稳、安静。其实从某种角度理解,整步和半步驱动控制也是细分驱动的一中类型。它们的关
系好比是圆和椭圆,正方形和长方形的这个相似性。
细分有电流和电压两种体现,电流细分是细分驱动的其中方法,恒流的实现常用斩波驱动,给定的电流是以正
弦波分布。电压细分是细分的另一种方法,通常以正弦波的电压驱动电机的线圈,可以不需要反馈地实现电机的细
分驱动,但是由于电机的反电势等的作用,正弦波电压驱动并不能产生正弦波的电流,因此效果没有电流细分好,
但是它的驱动电路相对简单。
目前细分方式也可以提高电机的步进角分辨率,但是很多场合并不是细分驱动的使用初衷。他们更多原因是为
了减缓步进电机运转过程的震动和噪声,让电机的力矩输出更加的平稳。
我们先浅浅的了解了下步进电机的3种常规驱动方式,最终还是在实际的项目使用中,选择适合我们项目需求的一种,
望大家在开发过程一切顺利。
|




