无刷直流电动机工作原理
1)旋转磁场的产生
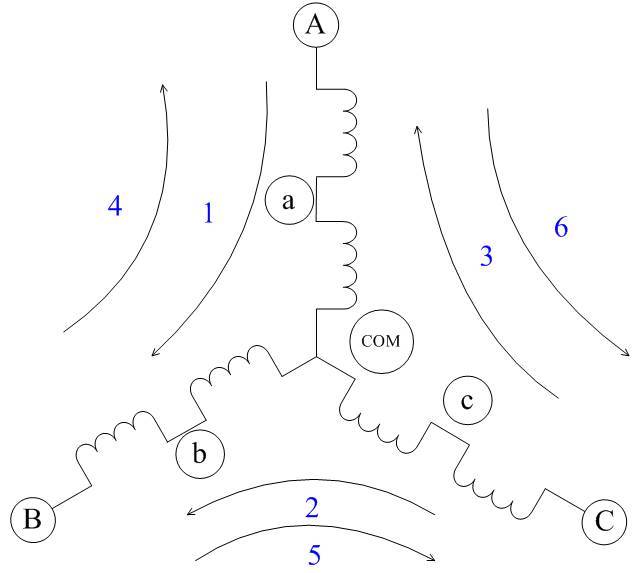
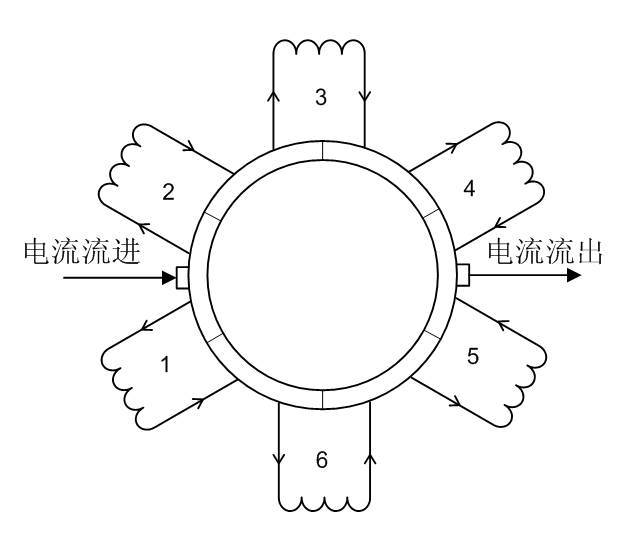
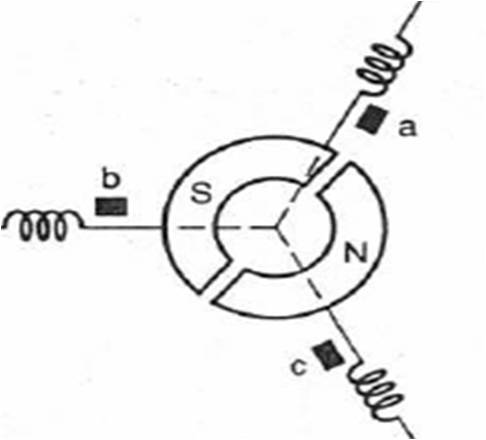
假定电机定子为3相6极,星型连接。转子为一对极。电流方向不同时,产生的磁场方向不同。若绕组的绕线方向一致,当电流从A相绕组流进,从B相绕组流出时,电流在两个绕组中产生的磁动势方向是不同的。
三相绕组通电遵循如下规则:
每步三个绕组中一个绕组流入电流,一个绕组流出电流,一个绕组不导通;
 .jpg)
6步通电顺序如下:
1.A+B- 2.C+B- 3.C+A- 4.B+A- 5. B+C- 6.A+C-
每步磁场旋转60度,每6步旋转磁场旋转一周;每步仅一个绕组被换相。
随着磁场的旋转,吸引转子磁极随之旋转。
磁场顺时针旋转,电机顺时针旋转:1→2→3→4→5→6
磁场逆时针旋转,电机顺时针旋转:6→5→4→3→2→1
1.A+B- 2.C+B- 3.C+A- 4.B+A- 5. B+C- 6.A+C-
2)如何实现换相
1.A+B- 2.C+B- 3.C+A- 4.B+A- 5. B+C- 6.A+C-
必须换相才能实现磁场的旋转,如果根据转子磁极的位置换相,并在换相时满足定子磁势和转子磁势相互垂直的条件,就能取得最大转矩。
要想根据转子磁极的位置换相,换相时就必须知道转子的位置,但并不需要连续的位置信息,只要知道换相点的位置即可。
在BLDC中,一般采用3个开关型霍尔传感器测量转子的位置。由其输出的3位二进制编码去控制逆变器中6个功率管的导通实现换相。
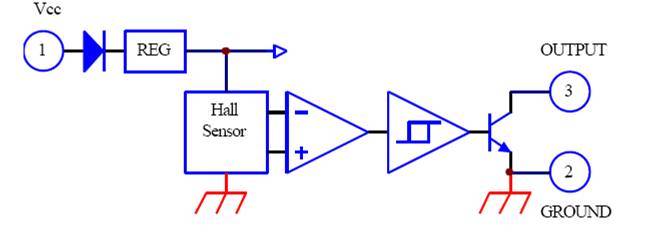
霍尔元件+信号处理电路=霍尔传感器
利用霍尔效应,当施加的磁场达到“动作点”时,OC门输出低电压,称这种状态为“开”;当施加磁场达到“释放点” 使OC门输出高电压,称其为“关”。基于这个原理,可制成接近开关。
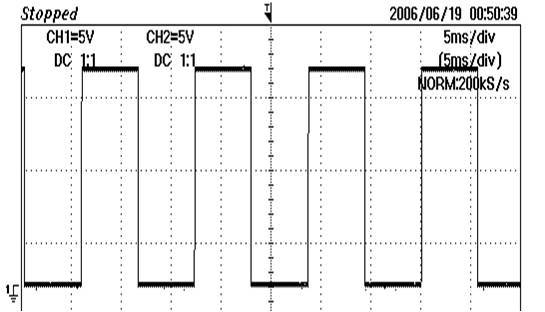
如果将一只霍尔传感器安装在靠近转子的位置,当N极逐渐靠近霍尔传感器即磁感应强度达到一定值时,其输出是导通状态;当N极逐渐离开霍尔传感器、磁感应强度逐渐减小时,其输出仍然保持导通状态;只有磁场转变为S极并达到一定值时,其输出才翻转为截止状态。在S-N交替变化磁场下,传感器输出波形占高、低电平各占50%。
如果转子是一对极,则电机旋转一周霍尔传感器输出一个周期的电压波形,如果转子是两对极,则输出两个周期的电压波形。
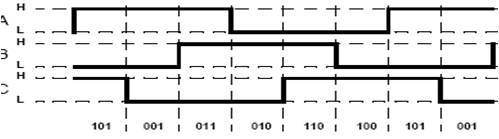
直流无刷电机中一般安装3个霍尔传感器,间隔120度或60度按圆周分布。如果间隔120度,则3个霍尔传感器的输出波形相差120度电角度;输出信号中高、低电平各占180度电角度。如果规定输出信号高电平为“1”,低电平为“0”,则输出的三个信号可用3位二进制编码表示。
直流有刷电机绕组中的电流实际上也是正负交替的 ,只是从电刷外部看电流是单方向的。
直流有刷电机通过换向机构换向,直流无刷电机通过霍尔开关及逆变器换相。
|




